Hannu KOIVULA, Antti LAAKSONEN, Sonja LAHTINEN, Jaakko
KUOKKANEN and Simo MARILA, Finland
Hannu Koivula, Antti Laaksonen, Sonja Lahtinen, Jaakko Kuokkanen,
Simo Marila
The National Land Survey of Finland (NLS) operates a nation-wide GNSS
network of 20 stations. All stations, equipped with individually
calibrated choke ring antennas and GNSS-receivers, track 1 Hz data from
GPS, Glonass, Galileo, Beidou and SBAS. The data are streamed to the
processing center of the NLS, where error modeling takes place. DGNSS
corrections are transmitted through an IP network using NTRIP protocol
and RTCM standards. The RINEX data of all the stations are stored for
post processing purposes. Both DGNSS correction and RINEX data are
freely available open data.
The Finnish Geospatial Research Institute (FGI), the research unit of
the NLS, maintains the coordinate system of Finland, the national ETRS89
realization EUREF-FIN. The time series of daily RINEX data are analyzed
for monitoring the deformations of the EUREF-FIN. The frame is mainly
deformed due to the postglacial rebound and plate tectonics. Due to the
crustal deformation the relation between ITRF (International Terrestrial
Reference Frame) and EUREF-FIN is not accurately known without constant
monitoring. The FGI can open any GNSS data, including NRTK (Network RTK)
corrections for educational, development and research purposes.
The NRTK service will be improved so that it fulfills the internal
surveying needs of the NLS. For this purpose the NLS has initiated a
project for 2017-2019 to densify FinnRef with 20-30 new GNSS stations.
Starting 2019 the FinnRef reference stations will be used as base
stations for aerial survey work and the NRTK service by 400 NLS
surveyors for RTK.
FinnRef, with 40-50 stations, will be the highest order network of
the Finnish coordinate system. All FinnRef stations will be connected to
the precise levelling network. The height is further transferred to the
ARP of the GNSS antenna by tachymeter with sub mm accuracy. These data
together with an accurate geoid model may offer means for accurately
maintaining the height system in the future. Concrete pillars will be
constructed for absolute gravity measurements at a selection of the
FinnRef stations. They will in the future serve as first order gravity
network.
1. INTRODUCTION
The original Finnish Permanent GPS network Finnref was built between
1991 and 1996 by the Finnish Geodetic Institute. It consisted of 13
permanent GPS stations. The network was created to provide a basis for a
new national reference frame that would have good connections to
international frames. The new national frame was to be consistent with
satellite positioning that was becoming an important tool for surveying.
Another main task for the network was to observe crustal movements at
the GPS stations. This offered, for the first time, a nearly real-time
tool for monitoring deformations of the reference system.
The Finnish official reference frame EUREF-FIN is the national
realization of the ETRS89 (European Terrestrial Reference System).
EUREF-FIN is defined by the coordinates of the 12 FinnRef stations and
100 first order survey markers that were measured as field campaigns in
1996-1997.
The Ministry of Agriculture and Forestry granted funding for renewing
the FinnRef network in 2012-2013. The current network consists of 20
GNSS stations and 4 GPS stations. The network offers also open RINEX
data and an open DGNSS service with 0.5 m accuracy.
In the beginning of 2015 the Finnish Geodetic Institute was merged
into the National Land Survey of Finland (NLS). The Finnish Geodetic
Institute continued as a research unit of the NLS under a new name:
Finnish Geospatial Research Institute (FGI). In this paper we explain
how operations of FinnRef and the related positioning service are
organized in the NLS since the merge.
In Section 2 we explain the roles and responsibilities of different
units of NLS related to FinnRef. In section 3 we give the current status
of the network, its primary use and the open positioning service. In
section 4 we explain how the data is available for education, research
and development and give as an example the Aurora project that is a test
platform for autonomous vehicles in Finnish Lapland. In section 5 we
give future perspectives of the network.
2. FINNREF AS PART OF THE NATIONAL LAND SURVEY
The National Land Survey of Finland maintains the cadaster, i.e.
registers containing information on e.g. mortgages, registrations of
property rights and other property information. The NLS also conducts
research and its application as well as data and information system
development.
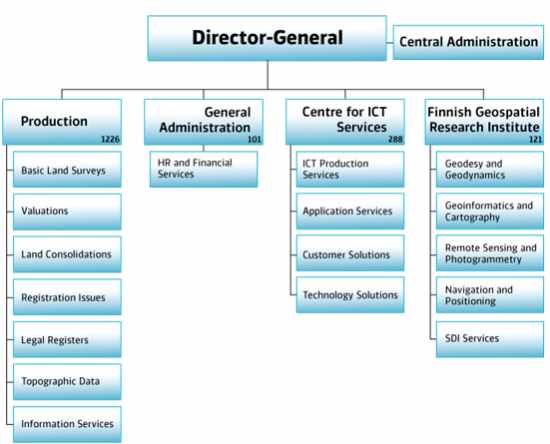
Figure 1. Organization of the National Land Survey of
Finland (Jan-1-2017).
The NLS has offices in tens of different locations across Finland.
The number of employees is nearly 2,000. The organization (shown in
Figure 1) consists of a central administration and four operative units
(Production, General Administration, Centre for ICT Services and the
Finnish Geospatial Research Institute (FGI)).
The FGI is responsible for developing and maintaining the Finnish
coordinate and height systems. The task is a basic duty of the
department of Geodesy and Geodynamics (FGI-GG). Other units of the NLS
support the task with field work etc. The FGI-GG defines the
installations and hardware used at the permanent GNSS stations and takes
care of the international connections to IGS, EPN and NKG. Any
fundamental changes at a FinnRef station should be authorized by the
FGI-GG. The FGI-GG processes daily coordinates of the FinnRef stations
and monitors the deformation of national reference frame. FGI-GG also
creates the transformations between GNSS and national reference frames.
All departments of the FGI also perform research related to coordinates
and GNSS. The FGI decides all data usage issues related to research and
development.
The positioning service is the responsibility of the
Centre for ICT Services. Operational work, namely operating the open
positioning service, is a task of the ICT production services. They
guarantee that the service performs in a defined accuracy and
reliability level. They also take care of the maintenance of the
stations and data transfers from stations to the processing center and
to the end users.
3. Current Status of FinnRef
3.1 Infrastructure
In 2012-2013 the FinnRef network was completely renewed [Koivula et
al., 2012]. The new FinnRef consists of 20 permanent GNSS stations (Fig
2). All stations except SAVU and SODA are founded on bedrock. The
stability of the bedrock was tested using a Scintrex CG5 gravimeter as a
sensitive seismometer. The standard antenna platform, a 3-meter high
steel grid mast, is narrowed from the top (see fig 2). In KEV2 and MET3
a similar, but 6-meter high, mast was used because of the obstacles
around the antenna. The masts are anchored straight to the bedrock with
screw bars. There are at least 3 survey markers around the mast. The
stability of the mast is regularly monitored with respect to the survey
markers using tachymeter and levelling instruments.
All antennas are JPL design Javad choke ring antennas with SCIGN
radar domes (JAVRINGANT_DM SCIS) to prevent snow
accumulating on the choke rings during the winter season. Radomes have
an effect on the signal propagation and therefore they influence the
estimated coordinates. There are also slight differences between antenna
phase patterns even if though similar antennas are used. To minimize the
uncertainty all antennas have been individually calibrated at Geo++ in
Germany using a calibration robot [Wübbena et al., 2000]. Receivers are
Javad Delta-G3T (JAVAD TRE_G3TH DELTA) and they track GPS, Glonass,
Galileo, Beidou and SBAS with 1 Hz.

Figure 2. FinnRef is a nation-wide network that consists of 20
continuously operating GNSS stations (left). On the right the TORN
station is shown. The antenna is mounted on a 3 m height steel mast that
is fixed to the bedrock. The top of the mast is narrowed to minimize
reflections from the mast.
Data connections are 3G/4G or
fiber connections. For open data products the 1 Hz data are streamed to
the GNSS analysis center of the NLS. At the analysis center the GNSMART
software is used to perform real-time error analysis of FinnRef allowing
us to provide DGNSS corrections for end users. For maintenance of the
reference frame the hourly data with 30 s interval are ftp-pushed to the
local data center of the FGI, where they are further archived and, in
case of international stations, submitted to the data banks of IGS and
EPN.
3.2 Maintenance of the national reference frame
The official coordinate system of Finland is the ETRS89 realization
called EUREF-FIN. It is defined by the coordinates of 100 first order
benchmarks and the 12 original FinnRef stations [Ollikainen et al.,
2000]. Four of these original GPS stations are also EPN (EUREF permanent
GNSS network) stations. The new FinnRef stations have been proposed in
December 2016 to the EPN and the data is already available at the EPN’s
regional data centres. The RTCM data will be provided as well. The
inclusion of the densified FinnRef network to the EPN provides valuable
data for the EUREF community eg. for intraplate deformation analysis.
The FGI contributes to the NKG’s GNSS Analysis Centre by processing
FinnRef as a sub-network. The analysis is done on a weekly basis using
the Bernese software. This solution is the main tool to monitor
deformations of the coordinate system. Long coordinate time series of
the FinnRef stations offer reliable velocities of coordinates. These
velocities are in a crucial role when coordinates are transferred from
ITRF to EUREF-FIN. In order to fully utilize the old and new time-series
of FinnRef we gathered overlapping data for roughly three years: 11/2013
(RINEX 2), 2/2014 (binary) - 11/2016 for non EPN-stations. All old EPN
stations are still dual stations. Figure 3 shows an example of the time
series of dual station VIRO/VIR2.
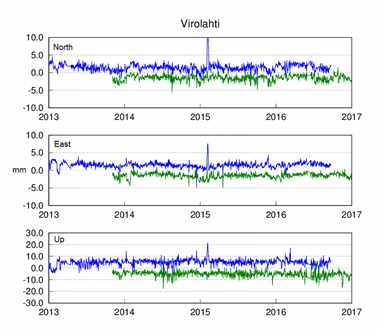
Figure 3. The detrended time series of the Virolahti stations: VIRO
(blue) and VIR2 (green) in mm. For clarity, the time series have been
offset from each other 3 and 5 mm in horizontal and vertical,
respectively.

Figure 4. Control measurements at the Joensuu GNSS stations. Tripods
are on survey markers founded on bedrock. New FinnRef station JOE2 is in
the front and old JOEN in the back.
In order to guarantee that the
coordinate time series relate to actual movements of the crust and not
to the deformation of the mast, we regularly perform control surveys at
the stations (Figure 4). All stations are surrounded by at least 3
survey markers. We use tachymeters to control the location of the GNSS
antenna (where a miniprism can be attached to the antenna mounting screw
as a reference point) with respect to the survey markers. The height
difference between the survey markers are precise levelled as well.
The official transformation parameters provided by the IERS are not
sufficient to accurately model intra-plate deformations or land uplift
[Häkli and Koivula, 2012]. When transforming from ITRF to EUREF-FIN we
take the intra-plate deformations between observation epochs into
account using the NKG land uplift model, as discussed in detail in Häkli
et al. (2016).
It is crucial that all the measurement in Finland are performed in
the official EUREF-FIN frame. For this purpose Public recommendations on
measuring control markers in EUREF-FIN have been published [JHS, 2017].
Traditionally all the coordinates are classified into different
measurement classes. This is the case for EUREF-FIN coordinates as well.
The highest class E1 includes the FinnRef stations and survey markers
defining EUREF-FIN. Under that there are classes E2-E6. E2 and E3 are
typically the highest classes of the municipalities and cities.
Traditionally measurements in a certain class had to be tied to the
closest benchmarks of the higher class. Our recommendation allows the
use of permanent GNSS stations, having official E2 coordinates, instead
of survey markers if certain measurement protocols are followed.
Any permanent GNSS station or network can obtain official E2 class
coordinates using the E2-Service of the FGI. The owner of the permanent
station or network agrees to transfer daily RINEX data to the FGI and as
a return gets official EUREF-FIN coordinates for the station. The FGI
monitors the quality of the E2 coordinates on a daily basis. If the
station is unstable and/or there is too much deviation from the official
coordinates the validity of the coordinates and the station will be
ended.
3.3 Open Positioning Service and post processing data
The data from all FinnRef
stations are streamed to the processing center of the NLS, where error
modeling takes place. For this purpose the GNSMART software is used.
DGNSS corrections are transmitted free of charge through the IP network
using the NTRIP protocol and the RTCM 2.x standards. Currently we are
transferring corrections for GPS and Glonass satellites only. It is
possible to choose corrections from a desired GNSS station, the closest
station or use a Network DGNSS solution where the correction is tailored
for the user position taking into account the error modelling of the
network. This mode guarantees the most homogenous solution over the
country. Also the RINEX files from all the FinnRef stations are openly
available. The RINEX data of 1 Hz is guaranteed to be available at least
two months after the observations. Users can decide the time span and
the observing interval of the downloaded data. For the most accurate use
the individual calibration tables are also available.
Differential GNSS service performances have been investigated and
published in Marila et al. 2016. Based on practical experiments
performed with state-of-the-art geodetic receivers about 0.5 meter
accuracy (horizontal even better) can be obtained in a good positioning
environment with a static or even a moving platform (car in the tests).
The distance from the FinnRef station has minor influence on the
accuracy and the Network DGNSS performed slightly better compared to the
nearest station corrections. In a challenging environment the
positioning accuracy decreases providing most of the time still higher
accuracy than with stand-alone GNSS. Relatively high availabilities of
DGNSS corrected solutions were obtained in the tests. Breaks occurred
mostly due to a very bad positioning environment (no satellites in view)
or breaks in the internet connection via which the DGNSS corrections
were obtained. Problems with the latter can be minimized by allowing the
receiver to use eldering corrections during the breaks. Additionally,
the Network RTK solution (open for research purpose only and used as a
reference solution during the car tests) performed really well in good
signal conditions.
Table 1. Obtained accuracies in m (3d-error, 95 % percentile) under
different conditions. *break in internet connection.
| |
Stand-alone GNSS |
Network DGNSS |
Network DGNSS Availability |
| Site |
95 % |
95 % |
% of time |
| Static |
| FGI Headquarters |
5.54 |
0.62 |
98.08 %* |
| FGI Headquarters (Forest) |
7.33 |
3.39 |
100.00 % |
| Dynamic |
| Field Road |
|
0.69 |
99.38 % |
| High-/Motorway |
|
4.36 |
97.29 % |
4. Open data for education, research and development
Section 3.2 described the data that is open for anybody to use. The
FGI can provide open data or tailor a service for any educational,
research or development purpose. We are able to provide data streams
from the FinnRef stations and also Network RTK corrections. We can
provide PRS, FKP and MAC corrections using RTCM 3.x formats. Our own
preliminary studies indicate that in good observing conditions it is
possible to reach 5 cm NRTK accuracy even if our network is really
sparse (average distance between stations is 200 km).
FinnRef error modeling was successfully used in the P3-service project
(https://p3-service.net/) financed
by private companies and Tekes, the Finnish Funding Agency for
Innovation. Our analysis center offered the error analysis of the
FinnRef network as SSR corrections through the IP network in RTCM
format. The corrections were utilized in prototype mobile phones that
allowed access to raw code and phase data. Raw FinnRef data are also
streamed to Kartverket in Norway to support their Ionosphere
Scintellation studies (http://sesolstorm.kartverket.no/). Figure 5 shows
an example of the tailored FinnRef network for research and development:
The Aurora ecosystem in Finnish Lapland gives the opportunity to
test new intelligent traffic solutions in extreme weather conditions.
Aurora has a closed testing ground but in the future also the whole E8
road will be a test field.
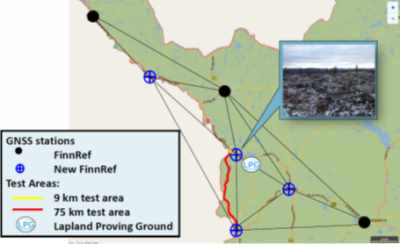
Figure 5: Infrastructure that will provide GNSS
correction data for intelligent traffic in Lapland.
5. Future
Perspectives
5.1 Improving Positioning Service for the NLS internal use
Currently the NLS is operating the open DGNSS service and NRTK is
reserved for research purposes only. The NRTK service will be improved
so that it fulfills the internal surveying needs of the NLS. For this
purpose the NLS has initiated a project for 2017-2019 to densify FinnRef
with 20-30 new GNSS stations (Figure 6). At the same time the quality
monitoring of the corrections and data will be improved. Starting 2019
the FinnRef reference stations will be used as base stations for aerial
survey work and the NRTK service by 400 NLS surveyors for RTK.
When fully operational in 2019 the positioning service will be
located at the Governmental Data Center. All the key components are made
redundant and therefore the availability of the service is as high as it
can get considering the hardware. Abilities to detect errors of the
system in multiple levels are constantly monitored and being developed.
In case of a software, data or hardware failure, appropriate measures
for recovery have been thought through and are also constantly under
development. The entire telecommunication network is built using secured
3G/4G or Fiber optic connections having SLA’s (Service Level Agreement)
with local ISP’s (Internet Service Provider). The whole service
architecture is designed as secure and scalable as possible taking into
account possible future needs. The service is still under heavy
development and all effort is put to secure the service and maintaining
the required level of accuracy, continuity, integrity and availability
in the RTK- and DGNSS-services.
The Ministry of Agriculture and Forestry has initiated a project that
gives the Parliament of Finland a clarification of spatial data policies
by the end of 2017. Typically these kind of clarifications may later
lead to legislative changes and may have influence on the open data
policy.
5.2 FinnRef as a coordinate, height and gravity reference network
The FGI is maintaining the coordinate, height and gravity reference
networks in Finland. The new FinnRef will provide basis for all of them
in the future. All new stations will be built as highest order reference
stations (as described in section 3.1.). All of these techniques support
each other and may give valuable information. For example a slowly
growing forest may be seen on long GNSS time series as slow vertical
velocity even if the station is not uplifting. Uplift models by repeated
levellings or gravity observations may help to notice the anomalies.
FinnRef, with 40-50 stations, will be the highest order network of
the Finnish coordinate system. The majority of the stations will be
built on bedrock and their stability will be monitored. This dense
reference network allows us to consider changing into an active
definition of the reference frame. This would mean that the national
reference frame would be defined by the permanent GNSS stations instead
of a number of fixed benchmarks. Also the E2 class stations could be
included in this definition if necessary. The network will also offer a
dense velocity field for intra-plate deformation models. This will
improve the accuracy of transformations from GNSS coordinates to the
national realization. A dense active reference network gives us the
possibility to aim for a fully dynamic time dependent reference frame in
national measurements. However, deciding to do so means a major change
in measurement guidelines, registers, GIS software etc.
All FinnRef stations will be connected to the precise
levelling network (Figure 6). The survey markers of every FinnRef
station will be precise levelled from the closest pair of stable first
order precise levelling benchmarks. The height is further transferred to
the ARP of the GNSS antenna by tachymeter with sub mm accuracy. By
precise levelling we can offer official normal heights for the stations,
long GNSS time series provide ellipsoidal heights and change rates with
small uncertainties. These data together with an accurate geoid model
may offer means for accurately maintaining the height system in the
future. The major height related challenge in Finland is postglacial
rebound, meaning that the land is uplifting between a few millimeters up
to one centimeter per year.
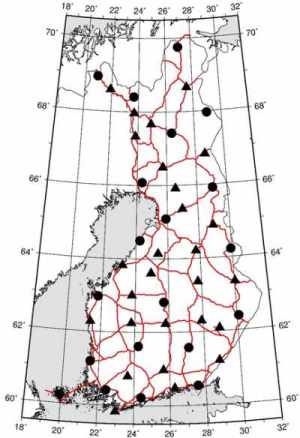
Figure 6. All FinnRef stations will be
connected to the precise levelling network (red lines). Current stations
are shown with dots and planned stations with triangles. The final
locations of the new stations will be decided in 2017-2018.
The current first order gravity network FOGN consists of 50 gravity
points on accessible locations. Traditionally many of these points are
locating on concrete or granite stairs in front of churches. These
locations were considered to be safe from construction works of the
urbanizing society. The points have been re-measured with an A10
absolute gravimeter in 2009-2010. Concrete pillars will be constructed
for absolute gravity measurements at a selection of the FinnRef
stations. Already today we have time series of absolute gravity
measurements from 12 FinnRef stations with FG5. We intend to increase
this number by six in order to study the influence of postglacial
rebound to our gravity system.
6. concluding remarks
The Finnish Permanent GNSS network and its positioning services are
operated together by two units of the National Land Survey. The Centre
for ICT Services is responsible for the open services like the
DGNSS-service, data transfers etc., while the research unit, Finnish
Geospatial Research Institute FGI, concentrates on maintaining the
reference frame and research work. Both units are working in close
co-operation. The NLS project to improve NRTK services is strongly
supported by the FGI with expertise and vision on future reference
frames and services. In the near future the improved services will
increase the possibilities of the NRTK users to obtain reliable accurate
EUREF-FIN coordinates from the service that is maintained by the same
organization that maintains the reference frame as well. The new
densified FinnRef will bring the definitions of coordinate, height and
gravity references to the same geographical location, giving a unique
possibility to study phenomena that are common for all reference frames.
REFERENCES
Häkli, P. and Koivula, H., 2012. Transforming
ITRF coordinates to national ETRS89 realization in the presence of
postglacial rebound - Evaluation of Nordic geodynamical model in
Finland. . In S. Kenyon et al. (eds.), Geodesy for Planet Earth,
International Association of Geodesy Symposia 136, Part 1, 77-86, DOI
10.1007/978-3-642-20338-1_10, Springer-Verlag Berlin Heidelberg 2012.
Häkli, P., Lidberg, M., Jivall, L., Nørbech, T., Tangen, O., Weber, M.,
Pihlak, P., Aleksejenko, I and E. Paršeliunas, 2016. The NKG2008 GPS
campaign – final transformation results and a new common Nordic
reference frame. Journal of Geodetic Science. Volume 6, Issue 1, ISSN
(Online) 2081–9943, DOI: https://doi.org/10.1515/jogs-2016-0001, March
2016 JHS, 2017. Kiintopistemittaus EUREF-FIN-koordinaattijärjestelmässä
(in finnish). JHS 184.
http://www.jhs-suositukset.fi/web/guest/jhs/recommendations/184/
[accessed 2017 Feb 19].
Koivula, H., Kuokkanen, J., Marila, S.,
Tenhunen, T., Häkli, P., Kallio, U., Nyberg, S. and M. Poutanen, 2012.
Finnish Permanent GNSS Network. Proceedings of the 2nd International
Conference and Exhibition on Ubiquitous Positioning, Indoor Navigation
and Location-Based Service (UPINLBS 2012), 3–4 October 2012, Helsinki,
Finland. IEEE Catalog Number: CFP1252K-ART. ISBN: 978-1-4673-1909-6.
Marila, S., Bhuiyan, M. Z. H, Kuokkanen, J., Koivula, H., and Kuusniemi,
H., 2016. “Performance Comparison of Differential GNSS, EGNOS and SDCM
in Different User Scenarios in Finland,” Proceedings of ENC’2016,
Helsinki, Finland. DOI: 10.1109/EURONAV.2016.7530550 Ollikainen, M.,
Koivula, H., and Poutanen, M. (2000). The densification of the EUREF
network in Finland,” Publications of the Finnish Geodetic Institute,
129, 61 pages, 2000.
Wübbena, G., Schmitz, M., Menge, F., Böder, V.,
Seeber, G., 2000. Automated Absolute Field Calibration of GPS Antennas
in Real-Time, Proceedings of the 13th International Technical Meeting of
the Satellite Division of The Institute of Navigation (ION GPS 2000),
Salt Lake City, UT, September 2000, pp. 2512-2522.
BIOGRAPHICAL NOTES
Hannu Koivula is the head of the Reference Systems
research group at the FGI. He received his M.Sc. (tech) degree in1994
(Helsinki University of Technology) and Lic. (tech) degree in 2007
(Aalto University), both majoring geodesy. He has 20 years of research
experience in high accuracy GNSS applications and GNSS networks. He has
studied the accuracy of GNSS applications and lately specialized in
metrological traceability of GNSS measurements.
Antti Laaksonen
received his Bachelor of Engineering in Telecommunications in 2011 from
Lahti University of Applied Sciences. He has worked as an ICT Specialist
at the Centre of ICT Services at the National Land Survey since 2015,
before that in the Finnish Geospatial Research Institute since 2014.
Currently his main responsibility is in development and maintenance of
Finland’s Positioning Service and FinnRef network. He also works as the
hosting entity manager for Finland’s EGNOS RIMS ground station. He is
specialized in telecommunications and information technology
architecture and is currently studying for a Master’s degree in Business
Informatics at Metropolia University of Applied Sciences.
Sonja
Lahtinen is a research scientist at the Finnish Geospatial Research
Institute (FGI), National Land Survey of Finland. She received her M.Sc.
(Tech.) degree from Helsinki University of Technology, Finland, in 2009.
She has been analysing the FinnRef data for the maintenance of national
coordinate systems as well as operating the FinnRef positioning
services. Jaakko Kuokkanen received his Master of Science degree
(Geodesy) in 2012 from Aalto University. He has worked as a Research
Scientist at the Department of Geodesy and Geodynamics in the Finnish
Geospatial Research Institute since 2011. He is specialized in Real Time
Kinematic GNSS measurements and GNSS reference station networks.
Simo Marila received his Master of Science degree in 2011 from Aalto
University, Finland. His main subject was geodesy. He works now as a
Research Scientist at the Department of Geodesy and Geodynamics in the
Finnish Geospatial Research Institute. He was involved in renewing the
Finnish permanent GNSS network (called FinnRef) and his recent research
work has been mainly related to the reliability and accuracy of GNSS
positioning.
CONTACTS
Hannu Koivula, Antti Laaksonen, Sonja
Lahtinen, Simo Marila, Jaakko Kuokkanen
National Land Survey of
Finland
1Finnish Geospatial Research Institute
2Centre for ICT Cervices
Geodeetinrinne 2
FI-02430 Masala
FINLAND
Email:
firstname.lastname[at]maanmittauslaitos.fi



























